Polish engineers have developed the leg mechanism for the lunar hopper. The robot, commissioned by the European Space Agency (ESA), is intended to be an alternative to rovers that cannot always handle the difficult terrain of the Moon.
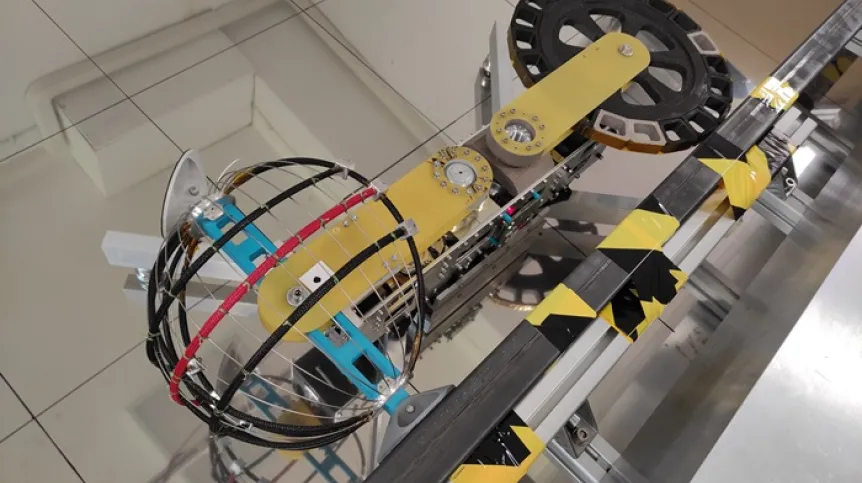
Polish company Astronika presented the completed lunar hopper leg mechanism at the European Space Research and Technology Centre of the European Space Agency (ESA-ESTEC) in Noordwijk (Netherlands).
Commissioned by ESA, Polish engineers are working on a robotic vehicle that could replace rovers. These machines traditionally used on the Moon cannot always handle the uneven terrain covered with regolith (a loose layer of rock and dust). A hopper will be able to move freely in the lunar mountains, which are often an insurmountable barrier for rovers. The mountainous regions of the Polish satellite are currently of highest interest to scientists researching, among other things, the past of the Solar System and natural resources.
In the first phase of the project, Polish engineers designed, built and tested the hopper's legs. This is a key component for the operation of the entire robot. After a successful presentation at the European Space Research and Technology Centre, Astronika hopes that the project will be continued and that ESA will commission it to build a full model of the machine that would be used during lunar missions.
The demand for similar robots will certainly increase - it is already known that in the next decade NASA, ESA and the Chinese National Space Administration alone want to send at least a dozen landers to the Moon, Mars and asteroids. Other countries and private companies also have similar plans.
The technology developed by Polish engineers is a solution to many problems that previous space missions have encountered when landing on celestial bodies. The landers overturned or got stuck in difficult terrain.
Previously tested jumping robots from other manufacturers only worked in microgravity conditions (low jump energy), so they could not move effectively on the Moon or Mars. Other machines were built as multi-unit walking structures, consuming a lot of energy in a short time - and this shortens operational time and limits the exploration of larger areas.
The Polish hopper weighs less than 10 kg and is energy efficient. Its creators say that it can jump to a height of more than 3 metres on the Moon.
'Our solution uses the concept of pushing off the surface with light legs - just like a grasshopper does. A hopper designed for lunar gravity is easily scalable to lower gravity levels as well. Our design is based on simplicity and durability with very low power consumption, says mechanical engineer and project leader Łukasz Wiśniewski.
During a lunar mission, the hopper's tasks may include: determining the composition of lunar dust, conducting spectrometric measurements, photographing the mother lander from various perspectives and analysing the load-bearing capacity of the surface. Equipped with cameras, the hopping robot can also examine the mechanical properties of the regolith. Knowledge about the lunar soil is crucial for the movement of vehicles and people on the surface of our satellite and the construction of possible bases there. Obtaining such information using a relatively inexpensive tool, such as a hopper, may reduce the costs of future space missions.
The ultimate design of the lunar robot will be revealed in the next phases of the project. The creators of the hopper plan to combine wheels and jumping legs in the machine: the wheel will be placed on the leg, which will enable the robot to jump above the ground using a device that has just been presented at the ESA's European Space Research and Technology Centre.

'So far, most exploration missions have been planned very conservatively. Rovers and landers were sent only to relatively flat, safe terrain, which unfortunately only provides scientific information about the most recent history of the celestial body. And still, these machines would often land in unforeseen difficult conditions or overturn and slowly become unusable,’ says Wiśniewski.
He adds that it is much more interesting to send scientific instruments to hard-to-reach areas, e.g. cliffs and rocks or canyons. In such formations you can see cross-sections of the rocks that make up the celestial body.
'However, no one will dare to send a rover worth several hundred million euros on a potentially suicide mission. A small hopping robot is relatively inexpensive and easy to take on board. It is like a clever and helpful scout that can explore risky terrain before a rover enters it,’ Wiśniewski says.
In his opinion, using a hopper increases the safety and scientific value of the mission - for example by obtaining information about the mechanical properties of the Moon's surface.
'If a hopper gets stuck somewhere, it doesn't matter. This is its task, to reach where no one has ever tried before and make pioneering measurements. At the same time, the mission will not lose the ability to accomplish its main goals with the mother lander or rover,’ says Wiśniewski.
The work on creating the hopper was financed by the European Space Agency under the PLIIS (Polish Industry Incentive Scheme) programme in cooperation with the Space Research Centre of the Polish Academy of Sciences. The project was possible thanks to the cooperation of the Polish space sector, the Ministry of Development and Technology and the Polish Space Agency. (PAP)
abu/ bar/ kap/
tr. RL