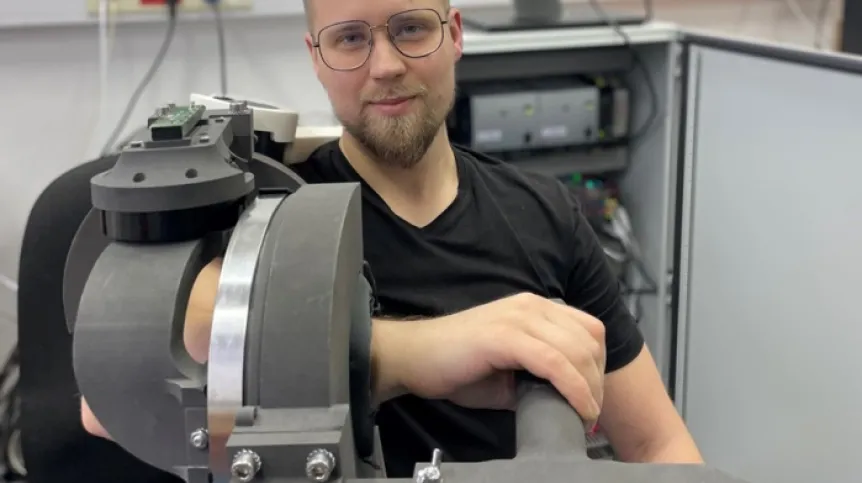
Designed for people after a stroke, accidents or with neuromuscular diseases, a 3D printed hand rehabilitation exoskeleton will help exercise movements of the shoulder and elbow joints. Engineers, programmers and physiotherapists will use artificial intelligence to automatically analyse patient's mistakes.
The device in question is an external, light mechanical skeleton, placed on the upper limb for rehabilitation purposes, which can be used in the process of physiotherapy. The winner of the National Centre for Research and Development LIDER programme, Piotr Falkowski, whose implementation doctorate is being carried out at the Łukasiewicz Research Network - Industrial Institute for Automation and Measurements (PIAP) and at the Warsaw University of Technology spoke to PAP - Science in Poland website about the invention.
LIGHTNESS OF CORRECT MOVEMENT
‘He said: The device is intended for people who have completely or partially lost the ability to move their entire upper limb. It can also be used by people in recovery - during rehabilitation, and even by people who are in good shape and want to improve their fitness. The device can also generate resistance during movement, acting as a kind of 'trainer'.
Falkowski designed the first exoskeleton during his master's studies, and during his doctorate he adapted it for applications in rehabilitation. However, before the first patient uses the device, a physiotherapist will 'teach' the device how to move correctly. The artificial intelligence will then begin learning to detect any errors the patient makes while using the exoskeleton. This requires the involvement of electronic engineers and programmers, as well as mechanical engineers who will select the best, lightweight material and 3D print a new version of the device.
Falkowski said: 'We already have a prototype of the exoskeleton made with 3D powder printing technology. In the Lider project, we will face two important challenges. Firstly, it must be lighter than it is now, and perhaps also stiffer. Therefore, we will look for a material we will use to produce a usable version of the device, one that is light and easy to use at home.’ He added that the person operating the exoskeleton must be able to easily put it on the patient's arm, and the equipment should also be easy to transport.
In the future, such devices may be used not only in hospitals or physiotherapy centres, but can also be distributed to fire stations, senior clubs or community centres - places where elderly citizens, especially in rural areas, can easily get to and exercise independently or under remote supervision of a specialist.
PROGRESS IN REHABILITATION ROBOTICS THANKS TO AI
In addition to weight reduction, an important challenge of the project will be to develop an effective method of controlling the exoskeleton. Scientists will create an AI algorithm that will be able to analyse any movement introduced by a physiotherapist. The physiotherapist will only present the expected movement, and the system will additionally assess whether there are any undesirable anatomical compensations and functional errors.
'Exercises using an exoskeleton involve the device repeating the movement along a precise trajectory that the patient should imitate. During this process, the exoskeleton supports or resists movements in individual joints, depending on the set mode. In the case of completely immobile patients, the exoskeleton can also perform movements for them,’ Falkowski said.
Scientists take into account the fact that people with disabilities often make unusual movements in an attempt to compensate for pain or limitations. Falkowski said: ’If the correct movement causes pain, the patient may try to perform it in a different way, which is called compensation. Although these attempts can be effective, incorrect movement may lead to excessive strain on certain muscle groups and potential injuries. People undergoing rehabilitation may also develop incorrect movement habits.’
The exoskeleton must evaluate how the patient performs the movement compared to a model. The device analyses the patient's movement trajectory and compares it with the expected path. In addition, the patient's movement is assessed in terms of possible anatomical compensations, resulting from joint restrictions, among other things. The next step is to identify errors that are important in the context of functional rehabilitation that focuses on everyday life activities. An example of a functional error would be lifting the hand incorrectly when drinking from a cup, which leads to spilling the drink.
In Falkowski’s opinion, artificial intelligence is irreplaceable here. It obtains knowledge regarding the model movement from the physiotherapist and identifies typical errors that may occur during attempts. Its task is to reproduce the process of typical physiotherapy - observation of movement and ongoing assessment of its correctness and accuracy in each joint while ensuring the patient's correct body posture (e.g. avoiding slouching).
BIOENGINEERING ENTHUSIASTS WANT TO HELP PATIENTS AND THEIR FAMILIES
Engineering skills, the expertise of a physiotherapist and the ability to mathematically model the world are required to effectively control an exoskeleton. That is why Falkowski's team is interdisciplinary. The leader himself is an engineer with experience in rehabilitation robotics and biomechanics. The team also includes a mechanic engineer and a 3D printing design specialist - a person with experience in three-dimensional scanning and printing. In addition, it involves an automation specialist and an IT specialist with experience in programming rehabilitation devices. There is also a physiotherapist who, like the others, is enthusiastic about combining physiotherapy with engineering. Additionally, the project will involve 'helpers' involved in assembly, technical documentation and preparing learning data for artificial intelligence systems.
'Rehabilitation therapy robots can be an excellent solution in the therapy of people after strokes who have problems with travelling to specialist centres and moving around in general. When I think about helping such people, I also think about helping their loved ones - the families who usually sacrifice a lot for the patients, taking them to frequent rehabilitation sessions. Currently, our technology is sufficiently developed, and medicine and engineering are intertwined, so we can help these people, as well as people after accidents, patients with other neurological disorders that cause these muscles not to work as they should,’ says Falkowski.
The project 'Preparation of a universal and lightweight structure and method of controlling an exoskeleton for remote, home functional rehabilitation' is planned for two years. The work is financed by the Polish National Centre for Research and Development.
PAP - Science in Poland, Karolina Duszczyk
kol/ zan/ kap/
tr. RL