Will a swarm of autonomous rovers perform scientific exploration of Mars faster and more precisely than currently used rovers? This concept is being tested in Józefosław near Warsaw by researchers from Poland, Switzerland and the USA, as part of a project conducted in cooperation with NASA.
The research is being conducted by academics and students of the Faculties of Geodesy and Cartography and Electronics and Information Technology at the Warsaw University of Technology, as well as the Faculty of Geography and Geology at the Jagiellonian University. The project also involves universities in Basel (Switzerland) and San Jose (USA).
The researchers have completed the first three-day tests of cooperation between two rovers equipped with sensors, including Lidar, stereoscopic cameras, and ground-penetrating radar. The research is taking place at the Warsaw University of Technology centre in Józefosław, where the CENAGIS (Centre for Scientific Geospatial Analyses and Satellite Computations) project is being implemented.
The research project leader Professor Robert Olszewski from the Warsaw University of Technology explains that the tests are designed to determine whether a swarm of autonomous rovers will perform scientific exploration of Mars faster and more accurately than the currently used rovers the size of a large off-road vehicle, equipped with all possible sensors, or even the duo of Perseverance and the small drone Ingenuity patrolling the area from the air. According to the scientist, the advantage of the swarm could be not only a wider range of operation on the Red Planet, but also mutual compensation of their functions by smaller devices in the event of a failure.

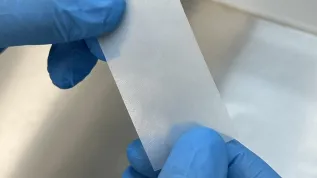
The hand-held rovers weighing around 8 kg can be equipped with simpler devices, such as lidars, which, by firing a laser beam, create a model of the terrain, cameras that image the surroundings in visible and infrared light, georadars that can detect unusual objects, and even arms capable of small drilling, e.g. in search of water compounds or to extract research material from rocks.
'We are checking whether our rovers provide feedback that is as reliable as professional surveying equipment. It turns out that the measurements are accurate enough to make a model of the terrain. This creates prospects for using a swarm on Mars', says Professor Olszewski.
He adds: 'Rovers cannot wait for a signal from Earth, because its arrival time is too long. They must operate like a colony of ants. After looking around (they have machine vision), exchanging information about what they see, where it is safe, what the threats are, whether the slope is not too steep and the soil is not too loose - they should make decisions autonomously. It is about simple planning, which rover goes right, which goes back, where and what measurements to perform and when to jointly send the structured, processed information via the base - to Earth'.

In Olszewski’s opinion, this mode of operation makes the entire process much faster and cheaper. A small rover is at least 3 orders of magnitude cheaper than Perseverance-type devices. In addition, the risk of failure is diffused among several dozen objects. Even if several of them fail to complete their tasks, the mission can still be completed. The robots are controlled by the ROS (Robot Operating System). This is an open-source programming platform for creating robot control software. Data transmission and processing is carried out in Linux.
NASA is currently sending rovers to Mars that can search for things like fossilized traces of life. 'There are no positive results yet, but only a microscopic permille of the entire planet has been examined. It costs a lot and takes a very long time, because the signal sent back and forth, moving at the speed of light, takes several minutes to travels there. That is why it took the Opportunity rover 17 years to cover the marathon distance of over 42 km. The question is: could the same thing be done faster, easier and cheaper', Olszewski says.
Before the devices are sent to Mars, tests are carried out on Earth. Field tests in Poland, in a specially prepared Mars field, will consist of two more stages, between which scientists will conduct analytical work.
The next stage will be field tests in Mars-like conditions, e.g. in the Atacama Desert or in Antarctica - humidity and temperatures are low there, and geomorphological forms that occur on Mars are also present.
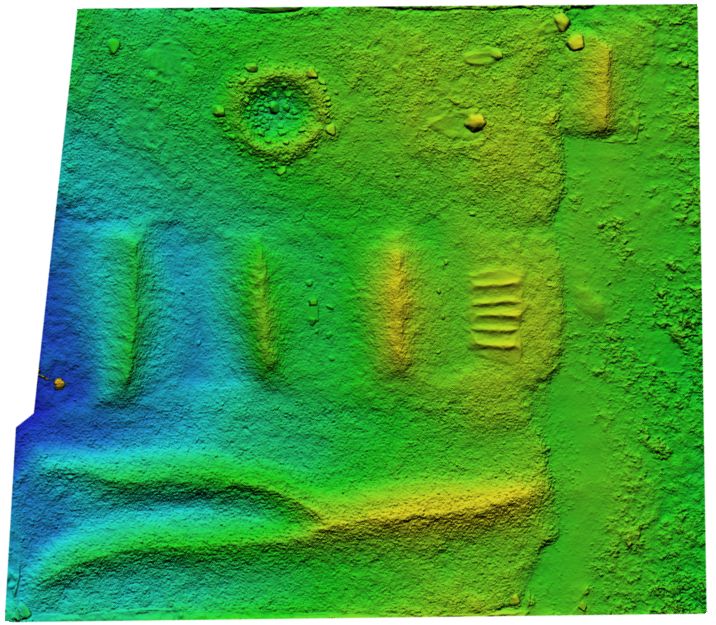
To prepare the test field reproducing geological forms occurring on Mars in Józefosław, researchers used nearly 40 tons of aggregate. It was primarily dolomite with a high iron content, which gives it a reddish colour. This is important for the sensors that perform measurements, as is the fraction, i.e. the structure of the aggregate, which also contains basalt, quartzite and gravel.
The rovers tested on 'Mars in Józefosław' are built by Fiction Lab, a Polish company founded by graduates of the Wrocław University of Science and Technology. The scientists also cooperate with NASA's rocket propulsion lab.
The Polish participants of the project cooperate with NASA's Ames Research Center in Silicon Valley, where, under the supervision of Professor Christopher McCay, research is being conducted on the process of gradual terraforming of Mars. Terraforming is the process of changing the conditions on a cosmic body to ones that are similar on those on Earth, which would make human settlement possible. As part of the project, the researchers are checking whether it would be possible to warm Mars by several dozen degrees and change the composition of the atmosphere.
In turn, assuming a positive course of terraforming, as part of cooperation with Professor Christian Corner from the University of Basel they are analysing what kind of plants could be introduced to Mars to start converting carbon dioxide into oxygen.

'Searching for life on another planet is really searching for water. If we find its compounds, we as humanity have a great chance of finding some markers of biological life. Our rovers are also ready for this', Professor Olszewski says. (PAP)
PAP - Science in Poland, Karolina Duszczyk
kol/ agt/ kap/
tr. RL