„Każda wystarczająco zaawansowana technologia jest nieodróżnialna od magii” (Arthur C. Clarke). Naukowcy pracują nad stworzeniem aktywnego materiału, zdolnego przyjąć formę dowolnego przedmiotu lub maszyny. Mocny jak stal, lecz płynnie zmieniający swój kształt – czy terminator T-1000 zapuka niebawem do naszych drzwi?
Autorami artykułu są Jakub Lengiewicz i Paweł Hołobut - laureaci pierwszej nagrody w I edycji Konkursu Popularyzatorskiego Instytutu Podstawowych Problemów Techniki PAN.
Zmiennokształtne istoty i maszyny od dziesiątków lat pojawiają się w literaturze i filmach science-fiction. Liczne przykłady literackie można znaleźć np. w powieściach Stanisława Lema („Niezwyciężony” (1963), „Pokój na Ziemi” (1985), „Fiasko” (1987)), który poruszał ten temat na przestrzeni całej swojej kariery. Wśród postaci filmowych, najbardziej sugestywnym przykładem zmiennokształtnej maszyny pozostaje chyba robot T-1000 z filmu „Terminator 2” (1991). Z kolei film „Wielka Szóstka” (2016) bardziej szczegółowo pokazuje, jak takie maszyny mogłyby być skonstruowane. W większości fikcyjnych przypadków charakterystycznymi cechami maszyn zbudowanych ze zmiennokształtnych materiałów są ich umiejętność adaptacji do środowiska zewnętrznego i wykonywanych zadań oraz zdolność do samoregeneracji.
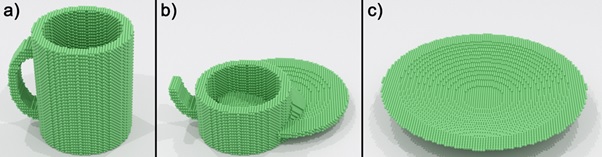
Fig. 1 Transformacja kształtu: filiżanka zamienia się w talerz. Zdjęcie: Prof. Julien Bourgeois i Prof. Benoît Piranda, UBFC, FEMTO-ST Institute, CNRS.
Tylko co tak naprawdę znaczy „zmiennokształtny materiał”? Kiedy mówimy „materiał”, mamy zazwyczaj na myśli coś optycznie jednolitego, jak metal, glina czy woda. Przez „zmiennokształtność” rozumiemy natomiast zdolność do przemian nieznanych do tej pory ludzkiemu doświadczeniu, takich, które pozornie przeczą prawom fizyki. Na przykład gdy rozlana woda sama wraca do szklanki, masa gliny samoistnie układa się w kształt naczynia, lub gdy metalowa kula rozpuszcza się, by uformować sześcian i znowu się zestalić.
Obszary zastosowań maszyn/materiałów zmiennokształtnych, podobnie jak i same maszyny, są osadzone w przyszłości. Można na przykład wyobrazić sobie futurystycznego Skype’a, w którym dałoby się uścisnąć rękę swojemu rozmówcy, lub grę komputerową, w której można by wchodzić w fizyczne interakcje ze zrekonstruowanymi postaciami z gry lub awatarami innych graczy. Z kolei w medycynie materiał zmiennokształtny mógłby być wprowadzany do krwiobiegu pacjenta, gdzie przystosowywałby się do aktualnych warunków fizjologicznych, przenikał do odpowiednich obszarów w docelowym organie i go leczył lub dokonywał zaprogramowanych ulepszeń. Takie adaptujące się, wielofunkcyjne, zmiennokształtne urządzenia są z pewnością atrakcyjną wizją, której realizacja mogłaby zmienić nasz sposób interakcji ze światem. Ich technologia jest jednak wciąż na bardzo wczesnym etapie rozwoju i nie jesteśmy nawet w stanie określić, które z możliwych zastosowań okażą się w ogóle możliwe. Faktem jest natomiast, że wyścig ku materiałom zmiennokształtnym rozpoczął się już na całym świecie, inspirując fascynujące kierunki badań naukowych.
Roboty złożone z robotów
Urządzeń zmiennokształtnych nie da się bezpośrednio zbudować z żadnego ze znanych obecnie materiałów. Atomy tworzące zwykłą materię są „pasywne” – nie mają własnej „woli”. Zmiana kształtu standardowych materiałów odbywa się przeważnie w wyniku działań zewnętrznych, jak to ma miejsce przy formowaniu w rękach plasteliny lub topieniu wosku w wysokiej temperaturze. Nie o takie pasywne przemiany chodzi w przypadku urządzeń zmiennokształtnych. Jednym ze sposobów stworzenia urządzeń samoistnie zmieniających kształt jest zbudowanie ich ze sztucznych „aktywnych atomów”. Takich, które mogą się samodzielnie poruszać.
„Aktywne atomy” muszą mieć pewien zestaw cech. Przede wszystkim muszą umieć się przemieszczać, np. „chodzić” po swoich sąsiadach. Po drugie muszą ogólnie wiedzieć, co się wokół nich dzieje. Z tego względu powinny móc porozumiewać się z sąsiadami i w jakiś prosty sposób obserwować otoczenie. Po trzecie, muszą mieć elementarny poziom inteligencji. Gdy otrzymują informacje z zewnątrz, muszą umieć je przeanalizować by podjąć dalsze działania. Wreszcie – potrzebują energii. Muszą więc być wyposażone w małe baterie i/lub czerpać energię bezpośrednio z otoczenia. Każdy „aktywny atom” lub „moduł” – jak je będziemy nazywać – jest więc robotem. Materiał zmiennokształtny może być zatem określony jako robot zbudowany z robotów.
Naturalne systemy podobnego typu znane są biologii. Nie są one tak zaawansowane jak rozwiązania rodem z fantastyki – bo znacznie wolniejsze i posiadające dość ograniczone możliwości – ale dobrze ilustrują ogólną koncepcję. Jeden z takich systemów tworzą mrówki ogniste (Solenopsis invicta), które w obliczu zagrożenia dla kolonii potrafią budować z własnych ciał użyteczne „konstrukcje inżynierskie”. Na przykład, są zdolne formować tratwy aby przetrwać powódź, mosty ponad przepaściami, czy też wieże i liny w celu pokonywania pionowych odległości. Innym przykładem są śluzowce komórkowe: jednokomórkowe organizmy, które spędzają większość życia pojedynczo. Czasami jednak gromadzą się i przemieszczają w formie przypominającej ślimaka, by następnie utworzyć grzyb, działając wciąż jak jeden wielokomórkowy organizm. W obu powyższych przykładach występują zespoły „biologicznych robotów”.
Ambicje twórców sztucznych systemów zmiennokształtnych sięgają daleko poza to, co oferuje natura. Dotychczasowe osiągnięcia są jednak dalekie od oczekiwań – z wielu powodów. Niektóre z problemów stojących przed naukowcami zostaną opisane poniżej. Ich pokonanie stanowi duże wyzwanie naukowe i technologiczne, wskazując jednocześnie szereg ciekawych kierunków badań.
Łańcuch jest tylko tak silny, jak jego najsłabsze ogniwo
Robot zmiennokształtny zbudowany jest z modułów, których kształt i sposób poruszania się można zaprojektować na różne sposoby. Zaproponowano dotąd wiele konstrukcji modułów. Jednym z przykładów są „Telecubes” z Palo Alto Research Laboratory – sześciany łączące się wysuwanymi ścianami, dzięki którym bloki mogą się wzajemnie przyciągać lub odpychać (Rys. 2, po lewej). Innym przykładem są „Catoms”, zaprojektowane przez Carnegie Mellon University, Intel Corporation oraz FEMTO-ST Institute/CNRS. Wokół ich zbliżonych do sfer powierzchni rozmieszczone są sterowalne magnesy lub płytki elektryczne, których siły przyciągania i odpychania powodują łączenie się lub toczenie się po sobie sąsiednich modułów (Rys. 2, po prawej). Wciąż nie wiadomo, jaki projekt uda się zminiaturyzować do rozmiarów ziarnka piasku, by utworzyć struktury złożone z milionów modułów.
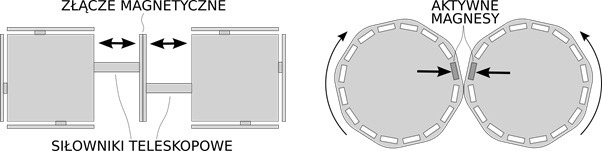
Rys. 2 Telecubes (po lewej) oraz Catoms (po prawej). Rysunek autorów
Aby urządzenie zmiennokształtne mogło zmienić swój kształt lub położenie, wszystkie jego moduły muszą wiedzieć, jak się poruszać. Przemieszczanie się dużej grupy modułów stwarza jednak wiele problemów. Wyobraźmy sobie na przykład stos modułów usypanych jak piasek. Ruch modułów z wnętrza stosu, a w szczególności tych na jego spodzie, będzie utrudniony przez spoczywający na nich ciężar modułów leżących powyżej i brak miejsca do manewru. Ograniczona siła napędu zazwyczaj nie pozwoli modułom utorować sobie drogi pośród sąsiadów. Dlatego ruch będzie w ogólności możliwy tylko po powierzchni stosu, co pozwala wprawdzie na zmianę kształtu, ale w bardzo wolnym tempie. Podobnie przemieszczają się wędrujące wydmy, których piasek przesuwany jest przez wiatr z jednego końca na drugi, powodując bardzo powolny ruch całej masy.
Co można więc zrobić, by poprawić zbiorowe możliwości modułów? Podejście rozwijane w Instytucie Podstawowych Problemów Techniki Polskiej Akademii Nauk (IPPT PAN) polega na grupowaniu mikroskopijnych robotów w ewoluujące struktury, podobne do żywych tkanek złożonych z komórek. Taka strukturyzacja sprawia, że robot modułowy upodabnia się do tradycyjnego robota lub organizmu z wyspecjalizowanymi organami, z tym, że będą one mogły się rozmontować po spełnieniu swojej roli i uformować coś nowego. Poniżej przedstawiamy dwie szczególnie użyteczne formy takiej organizacji.
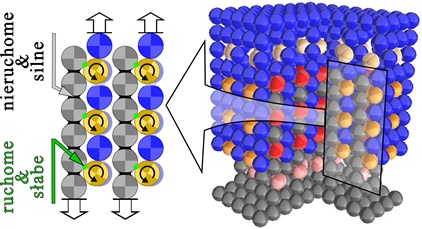
Rys. 3 Liniowy siłownik objętościowy. Niepublikowane materiały autorów.
Pierwsza rozwiązuje problem niewielkiej siły napędów poszczególnych modułów w stosunku do ciężaru całej struktury. Podstawą jest zbudowanie struktur podobnych do mięśni, które nazywamy „siłownikami objętościowymi”, zdolnych wytworzyć siłę proporcjonalną do ciężaru całej modułowej struktury. Dzieje się tak dlatego, że struktury te kumulują niewielkie siły wytwarzane przez poszczególne moduły „aktywne” rozmieszczone w całej ich objętości w jedną dużą siłę wyjściową. Przykładowy siłownik objętościowy zbudowany ze sferycznych modułów pokazany jest na Rys. 3. Czerwone i żółte moduły „aktywne” wywołują względny ruch modułów niebieskich i szarych, tworzących sztywny szkielet.
Druga rozważana forma organizacji umożliwia przyspieszenie zmiany kształtu poprzez umożliwienie jednoczesnego ruchu modułów w całej objętości struktury. Do tego celu struktura musi być porowata. Moduły mogą się wówczas przemieszczać przez tunele w materiale (jak woda przez gąbkę), a nie tylko po jego powierzchni (jak piasek po wydmie). Przykładową strukturę porowatą przedstawia Rys. 4 (po lewej). Szare moduły tworzą porowaty szkielet, czerwone natomiast przemieszczają się w sposób bezkolizyjny wzdłuż „linii przepływu”, wyznaczonych przez specjalny rozproszony algorytm, jak to pokazano na Rys. 4 (po prawej). Rys. 5 przedstawia przykładowy proces zmiany kształtu, gdzie białe linie ze strzałkami to linie przepływu.
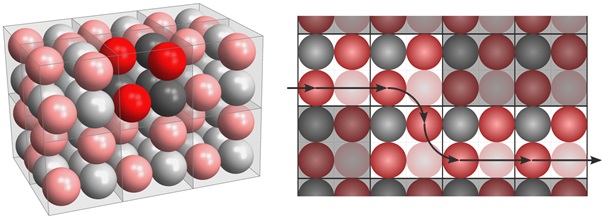
Rys. 4 Specjalna porowata struktura utworzona z modułów okrągłych (po lewej) oraz linia przepływu modułów wewnątrz tej struktury (po prawej). Za: J. Lengiewicz, P. Hołobut, Autonomous Robots 43, 97–122 (2019), (CC BY 4.0)
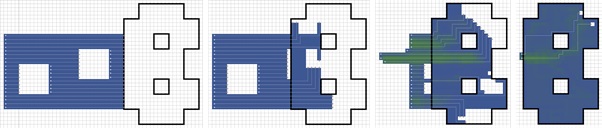
Fig. 5 Przykład stopniowej zmiany kształtu: struktura początkowa „przepływa” w kształt docelowy. Za: J. Lengiewicz, P. Hołobut, Autonomous Robots 43, 97–122 (2019), materiały dodatkowe, (CC BY 4.0).
Od rozmowy do działania
Zwykłe roboty i zwierzęta wyższe posiadają wyspecjalizowane organy służące do myślenia, czyli centralny procesor lub mózg. Decyzje tych ośrodków są przekazywane specjalnymi kanałami komunikacji, czyli np. nerwami, do mięśni bądź siłowników, wywołując ich reakcje. Robot modułowy jest inny. Nie posiada wyodrębnionego mózgu, nerwów ani mięśni. Jego ciało jest jednocześnie jego mózgiem. Mózgiem, którego neurony (moduły) są w ciągłym ruchu, co utrudnia skoordynowane działanie. Dlatego muszą one, a szczególnie te sąsiadujące, wciąż komunikować się ze sobą, by wspólnie podejmować decyzje.
Przykładowy efekt zbiorowego myślenia pokazany jest na Rys. 5, gdzie optymalne dla całej struktury linie przepływu wytyczane są przez moduły na drodze negocjacji. Innym przykładem jest problem zapewnienia stabilności mechanicznej robota modułowego w trakcie zmiany kształtu. Jak każda konstrukcja, robot modułowy może się przewrócić lub złamać, jeśli nie jest właściwie zbudowany. Żeby uniknąć takiej sytuacji, moduły muszą umieć zbiorowo przewidzieć, czy planowana zmiana kształtu nie spowoduje awarii.
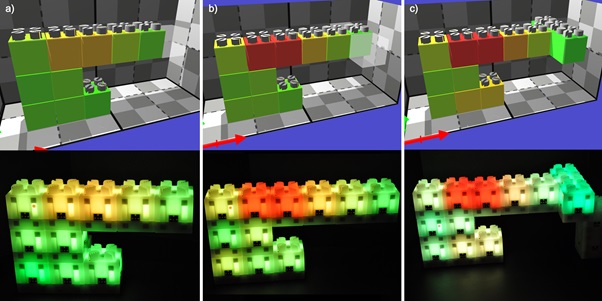
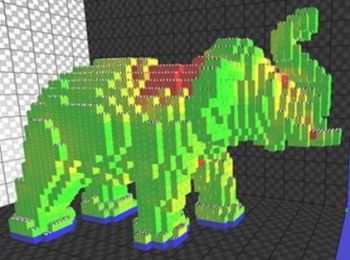
Rys. 6 Moduły przewidujące możliwość złamania konstrukcji po dodaniu nowych modułów; czerwony kolor wskazuje miejsce przewidywanego złamania. Górny rząd przedstawia symulacje na symulatorze VisibleSim. Dolny rząd: doświadczenia na modułach Blinky Blocks. Zdjęcie: Prof. Julien Bourgeois i Prof. Benoît Piranda, UBFC, FEMTO-ST Institute, CNRS.
We współpracy z Instytutem FEMSTO-ST we Francji oraz Uniwersytetem Luksemburskim zaproponowaliśmy obliczeniowe rozwiązanie powyższego problemu. W pierwszej kolejności moduły tworzą w swojej zbiorowej pamięci model matematyczny własnej struktury jeden krok przekształcenia do przodu. Na podstawie tego modelu wnioskują, rozmawiając ze sobą, czy przekształcona struktura ulegnie awarii czy też nie. Proces ten przypomina obliczenia mechaniczne wykonywane przez inżynierów, z tą tylko różnicą, że moduły sprawdzają wytrzymałość swojej własnej przyszłej struktury. Rys. 6 i 7 pokazują przykłady, w których moduły przewidują przeciążenie konstrukcji.
Rys. 7 Moduły obliczające obciążenie połączeń między-modułowych; czerwony kolor sygnalizuje przeciążone połączenia. Symulacje na symulatorze VisibleSim. Niepublikowane materiały autorów.
Terminator T-1000? Nie w najbliższej przyszłości
Istnieje wiele przeszkód stojących na drodze do powstania zaawansowanych robotów zmiennokształtnych. Po pierwsze, obecne konstrukcje modułów mają niedoskonałe: kształty, które nie ułatwiają szybkiej rekonfiguracji; napędy, które są zbyt słabe w stosunku do celów; i wreszcie rozmiary, które muszą być znacznie zredukowane. Po drugie, przemieszczanie oraz komunikacja wymagają znacznych nakładów energii, która powinna pochodzić z wewnętrznych baterii modułów lub być czerpana z otoczenia. Jak dotąd, zapotrzebowanie na energię skutecznie przeszkadza w działaniu układów modułowych przez dłuższy czas bez podłączenia do zasilania zewnętrznego. Wreszcie oprogramowanie, które nie zapewnia w tej chwili wystarczająco szybkiego planowania zmiany kształtu. Rozproszone algorytmy sztucznej inteligencji, które miałyby potencjalnie sterować interakcją robota zmiennokształtnego z otoczeniem, są jeszcze mniej zaawansowane.
Podsumowując, roboty zmiennokształtne rodem z science-fiction raczej nie powstaną w najbliższej przyszłości. Jest to zarówno zła, jak i dobra wiadomość, zależnie od naszego ogólnego podejścia do technologii i do kwestii: korzyści kontra ryzyko. Możemy się oczywiście mylić i być może uda się dokonać technologicznego przełomu który sprawi, że filmowe roboty płynnie zmieniające kształt staną się wkrótce faktem – kto wie? Prace nad nimi trwają.
Jakub Lengiewicz, Paweł Hołobut
Prace prezentowane w artykule były częściowo finansowane przez EU Horizon 2020 Marie Sklodowska Curie Individual Fellowship MOrPhEM, projekt nr 800150.
Bibliografia:
S.C. Goldstein, J.D. Campbell, and T.C. Mowry, Programmable matter, IEEE Computer, vol.38, no.6, pp.99–101, 2005.
Claytronics Physical Dynamic Rendering
J. Lengiewicz, M. Kursa, P. Hołobut, Modular-robotic structures for scalable collective actuation, Robotica, Vol.35, No.4, pp.787–808, 2017.
J. Lengiewicz, P. Hołobut, Efficient collective shape shifting and locomotion of massively-modular robotic structures, Autonomous Robots, Vol.43, No.1, pp.97–122, 2019.
B. Piranda, P. Chodkiewicz, P. Hołobut, S. Bordas, J. Bourgeois, J. Lengiewicz, Distributed prediction of unsafe reconfiguration scenarios of modular-robotic Programmable Matter, 2020, preprint available
M. Yim, W. Shen, B. Salemi, D. Rus, M. Moll, H. Lipson, E. Klavins, G.S. Chirikjian, Modular self-reconfigurable robot systems, IEEE Robotics Automation Magazine, Vol.14, No.1, pp.43–52, 2007.
P. Thalamy, B. Piranda, and J. Bourgeois, A survey of autonomous self-reconfiguration methods for robot-based programmable matter, Robotics and Autonomous Systems, Vol.120, p.103242, 2019.
J.W. Suh, S.B. Homans, M. Yim, Telecubes: Mechanical design of a module for self-reconfigurable robotics, Proceedings of the IEEE International Conference on Robotics and Automation, 11–15 May 2002, Washington, DC, USA, pp.4095–4101, 2002.
B. Piranda and J. Bourgeois, Designing a quasi-spherical module for a huge modular robot to create programmable matter, Autonomous Robots, Vol.42, No.8, pp.1619–1633, 2018.
P.C. Foster, N.J. Mlot, A. Lin, and D.L. Hu, Fire ants actively control spacing and orientation within self-assemblages, Journal of Experimental Biology, Vol.217, No.12, pp.2089–2100, 2014.
Film o mrówkach ognistych
Strona internetowa na temat badań nad mrówkami ognistymi w Georgia Tech
Fundacja PAP zezwala na bezpłatny przedruk artykułów z Serwisu Nauka w Polsce pod warunkiem mailowego poinformowania nas raz w miesiącu o fakcie korzystania z serwisu oraz podania źródła artykułu. W portalach i serwisach internetowych prosimy o zamieszczenie podlinkowanego adresu: Źródło: naukawpolsce.pl, a w czasopismach adnotacji: Źródło: Serwis Nauka w Polsce - naukawpolsce.pl. Powyższe zezwolenie nie dotyczy: informacji z kategorii "Świat" oraz wszelkich fotografii i materiałów wideo.