Krzysztof Walas. Źródło: IDEAS NCBR
Krzysztof Walas. Źródło: IDEAS NCBR
Aby roboty poruszały się sprawnie nie tylko po laboratorium, ale także po mieszkaniu czy po ulicy, potrzebne są badania z użyciem sztucznej inteligencji. Będzie je prowadzić nowy zespół badawczy, który powstał w IDEAS NCBR.
IDEAS NCBR to ośrodek badawczo-rozwojowy w obszarze sztucznej inteligencji. W jego ramach powstanie teraz nowy zespół Robotyka Interakcji Fizycznej.
Wyzwaniem dla twórców robotów jest to, by umiały się one dobrze orientować w dynamicznym środowisku i poruszać po bardzo zróżnicowanych podłożach, nie tylko po salach w laboratorium. Tu właśnie z pomocą robotyce przychodzi sztuczna inteligencja, w tym przypadku nazywana czasem fizyczną lub wcieloną inteligencją.
"Moje spojrzenie na rozwój robotyki to jej ścisłe powiązanie z rozwojem AI. Najpierw modele opracowywane są teoretycznie, następnie testowane na zbiorach danych bądź w symulatorze. W kolejnym kroku robotycy próbują je żmudnie zaaplikować w robotach działających w rzeczywistym świecie" - mówi Krzysztof Walas, lider nowo powstałego zespołu badawczego w IDEAS NCBR.
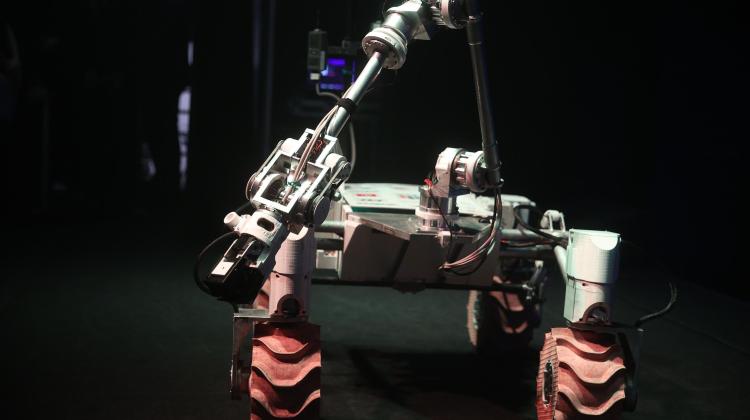
Lokomocja robotów kroczących w nieustrukturyzowanych środowiskach będzie jednym z głównych obszarów zainteresowań nowego zespołu.
"Chociaż roboty potrafią chodzić, skakać czy wykonywać salta w tył, czynności te są wykonywane głównie na stabilnym podłożu. Dążymy jednak do tego, aby roboty mogły wykonywać te zadania na różnych powierzchniach, wykorzystując kontakt całego ciała, a nie tylko stóp. Konieczność fizycznej interakcji jest szczególnie widoczna w zadaniach związanych z lokomocją robotów kroczących, a także w robotycznej manipulacji obiektami. W obu scenariuszach dogłębne zrozumienie fizyki kontaktu jest niezbędne do skutecznej interakcji z otoczeniem. W naszych badaniach chcemy rzucić wyzwanie obecnemu podejściu, które unika kontaktu z otoczeniem, oraz wykorzystywać wzrok i dotyk do percepcji i działania" - wyjaśnia Krzysztof Walas.
W pierwszej fazie badań zespół nie będzie samodzielnie budować robotów. Naukowcy będą korzystać z gotowych modeli robotów, aby rozwijać na nich algorytmy wspierane uczeniem maszynowym.
Na dalszych etapach prac powstaną dodatkowe komponenty fizyczne robotów przy wykorzystaniu druku 3D. Pozwoli to na prototypowanie rozwiązań związanych np. z chwytaniem bądź tworzenie nowych stóp dla robotów kroczących.
Naukowiec z IDEAS NCBR podkreśla, że kiedy roboty wchodzić będą w interakcje z otoczeniem, bezpieczeństwo będzie absolutnym priorytetem. Badacz chce tworzyć roboty (oraz sterujące nimi algorytmy), które nie będą szkodzić człowiekowi. Przywołuje w tym kontekście trzy prawa Asimova, które od kilkudziesięciu lat są podstawą robotyki i sprowadzają się do tego, że maszyny nie mogą dopuścić do sytuacji, w której człowiek doznałby krzywdy.
"Możliwe zastosowania komercyjne wyników naszych przyszłych prac to systemy produkcyjne, które do tej pory trudno było zrobotyzować, bo stosowane systemy robotyczne nie uwzględniały aspektów fizycznych obiektów, którymi manipulują" - mówi Krzysztof Walas.
Drugim z zastosowań, nad którymi pracować będzie zespół jest usprawnienie poruszania się robotów kroczących. Roboty zyskają lepszą wiedzę o parametrach fizycznych terenu, po którym się poruszają. "Tutaj jako możliwe zastosowanie widzę użycie robotów w inspekcji obiektów przemysłowych, w akcjach ratowniczych, czy w roli asystentów w naszych codziennych czynnościach. Robotyczni asystenci byliby w stanie podążać za nami wszędzie" - dodaje ekspert.
Nowy zespół badawczy w IDEAS NCBR zamierza korzystać z najnowocześniejszych narzędzi z szeroko pojętego obszaru AI, w tym uczenia maszynowego, zaawansowanego widzenia komputerowego, uczenia reprezentacji i przetwarzania sygnałów, ze szczególnym naciskiem na techniki nienadzorowane.
Nauka w Polsce
lt/ bar/
Przed dodaniem komentarza prosimy o zapoznanie z Regulaminem forum serwisu Nauka w Polsce.